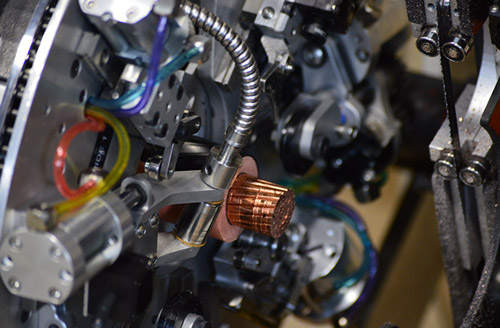
Automated Cable End Preparation
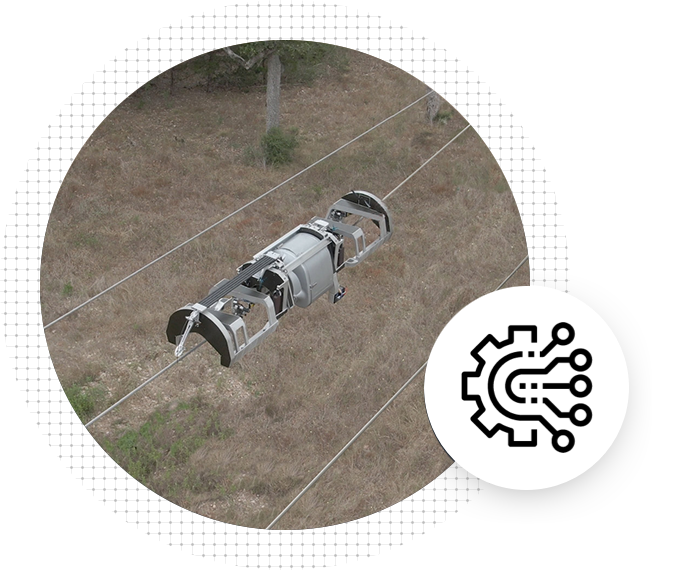
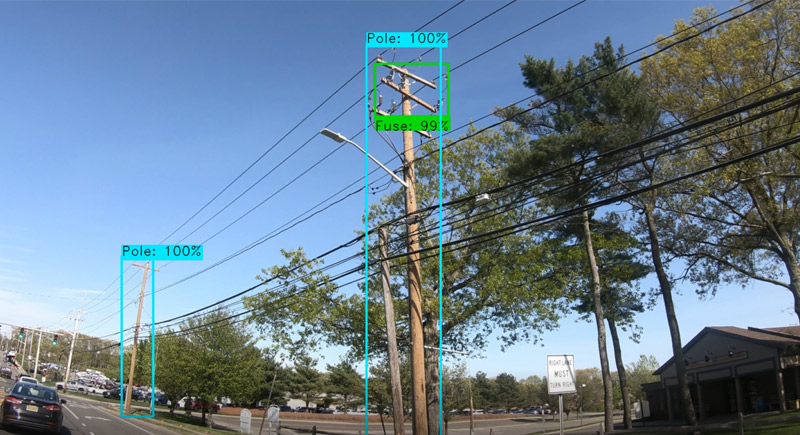
AIM: Asset Identification and Inspection
Robotic Roadworks & Excavation
GPR Mapping Robot
Solar Construction Robots
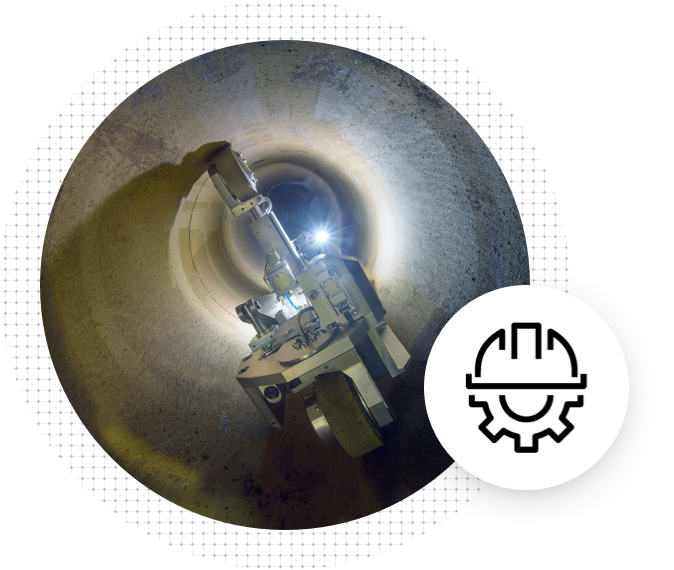
Live Gas Main Inspection Cameras
Emissions Recovery
NEW! AirPulse Vac-Ex Technology
Home > Projects
|