- Why ULC?
- R&D Services

Research & Development
Leading Innovation. Driving Results.
- Industries
X-ID CROSS BORE DETECTION SERVICES
Our patented acoustic technology detects cross bores from within gas mains and services. Learn MoreLIVE GAS MAIN INSPECTION
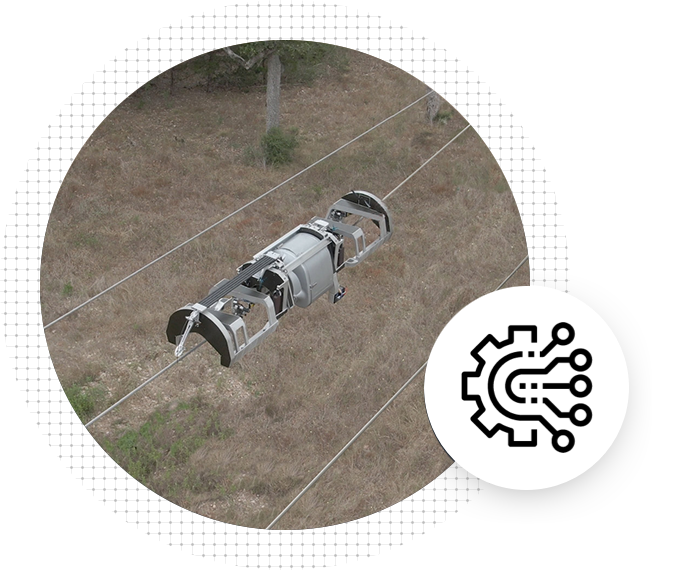
We are leaders in the deployment of camera and crawler systems into live gas mains. Learn More
PORTABLE EMISSIONS RECOVERY
Our drawdown compressor technology helps gas distribution utilities reduce emissions. Learn More
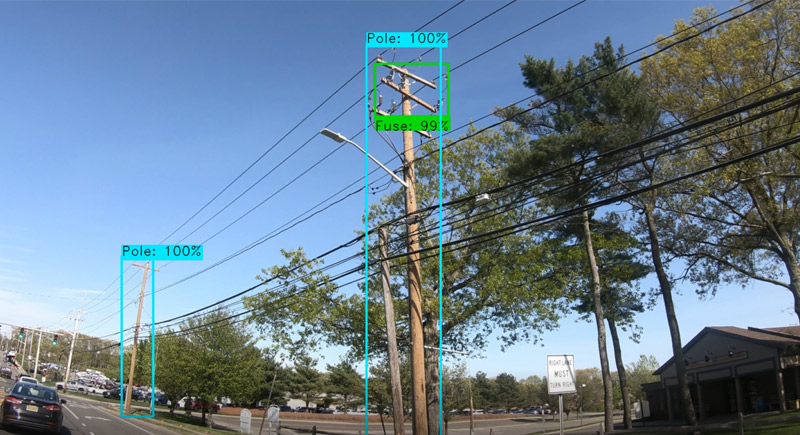
AIM: AI-POWERED UTILITY MAPPING
Using vehicle-mounted cameras along with AI and Machine Learning to map electric distribution poles and pole-mounted assets. Learn More
CIRCUIT BREAKER RACKING ROBOT
Breaker Racking RobotAutonomous mobile robot designed to rack and unrack large breakers within substations. Learn More
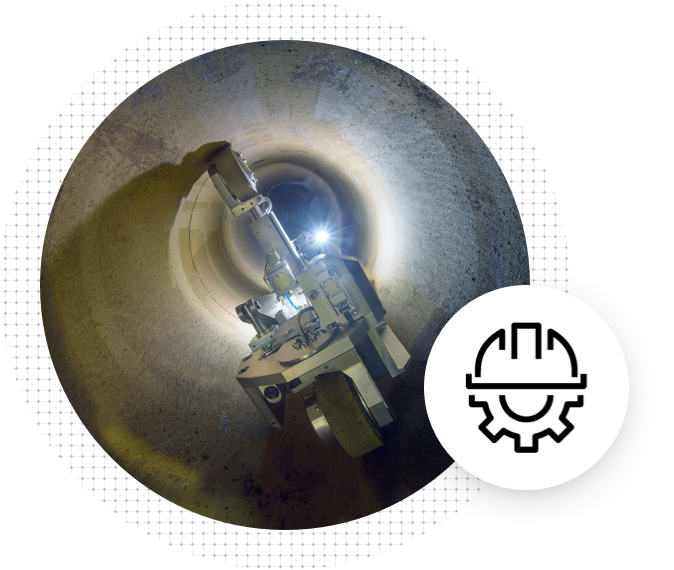
ELECTRIC CONDUIT INSPECTION
Our field service teams provide video inspection of conduits prior to cable pulls to identify obstructions and pinpoint damages. Learn More
Machine Learning for Jacket Foundation Inspection
ULC used machine learning to enable more efficient inspection of jacket foundations at the Block Island Wind Farm. Learn More
Electrical Conduit Inspection Services
Our field teams provide internal inspection of conduits to pinpoint obstruction and damage prior to cable pulls. Learn More
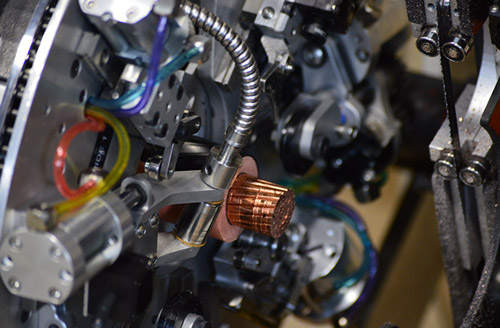
Robotics & Technology Development
We work with leading energy companies to develop, commercialize, and deploy robotic systems and technologies that support the construction, maintenance, and inspection of infrastructure. Learn More
- Products & Services
Field Services
Products
Live Gas Main Inspection Cameras
Emissions Recovery
- Company